
Prosty sterownik prędkości obrotowej
Prosty sterownik prędkości obrotowej falownika
Do przedstawienia prostej metody sterowaniem obrotami silnika czy też wrzeciona użyto falownika LG SV022IC5-1F który podłączono poprzez układ pośredniczący do portu LPT komputera PC. Programem sterującym jest zupełnie darmowy LinuxCNC (linuxcnc.org) który jest kompletną dystrybucją Linuxa posiadającą „real time-modified kernel”. Nie rozpisując się na temat samego programu należy wspomnieć, że pod stosunkowo ubogą nakładką graficzną znajduje się bardzo rozbudowane narzędzie umożliwiające na sterowanie napędami maszyn CNC w sposób bardzo profesjonalny. Zainteresowanych szerokimi możliwościami programu odsyłam do dokumentacji projektowej systemu.
Jak wspomniano, do sterowania wrzecionem użyto falownika SV022IC5-1F. Jednofazowy, 2,2kW o możliwościach daleko przewyższających funkcjonalność falownika potrzebnego do sterowania wrzecionem standardowej maszyny CNC.

Poza ustawieniami ogólnymi niezbędnymi do pracy z danym wrzecionem, na potrzeby tego przykładu należy ustawić parametr:
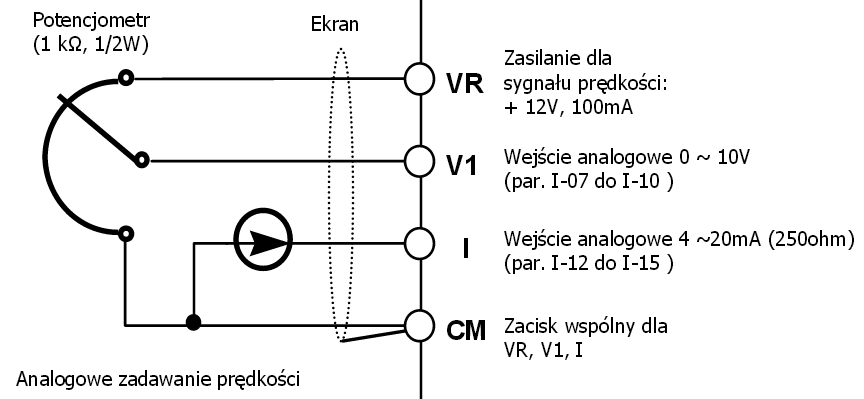
Frq na 3
co spowoduje, że zadawanie częstotliwości odbywać się będzie za pomocą zewnętrznego potencjometru. Potencjometr ten podłączony jest w naszym przypadku do wejść VR, V1, CM
Aby jednak sterować obrotami z poziomu programu obsługującego G-code (LinuxCNC) należy pierwsze skonfigurować port LPT sterujący pracą maszyny. Ze względu na to, że w artykule dotyczy sterowania obrotami silnika pozostałe ustawienia programu zostaną pominięte.
Konfiguracja LPT dla wrzeciona obejmuje ustawienie wyjścia PWM odpowiedzialnego za prędkość obrotową, włączenie wrzeciona oraz kierunek obrotów wrzeciona.
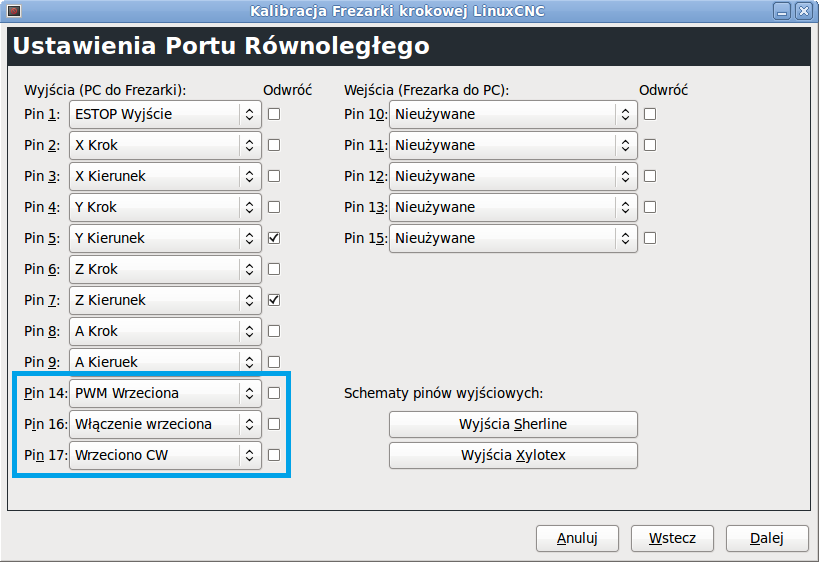
W przypadku włączenia wrzeciona i kierunku obrotów należy użyć wejść programowalnych falownika. W przypadku prędkości obrotowej użyte zostanie wejście analogowe falownika. Jak widać na rysunku na potrzeby sterowania wrzecionem użyto pinów 14, 16 i 17 portu LPT.
W przypadku programu LinuxCNC istnieją dwa sposoby sterowania obrotami. Jest to w oparciu o modulacje szerokości impulsu (PWM) lub o zmianę częstotliwości impulsów (PDM). Ze względu na to, że twórcy programu deklarują że to PWM jest bardziej dokładny to właśnie w oparciu o ten sposób oparty zostanie układ sterujący obrotami wrzeciona. W tym celu należy wypełnić pola programu konfigurującego wg przedstawionego rysunku lub w razie potrzeby odpowiednio je zmodyfikować.
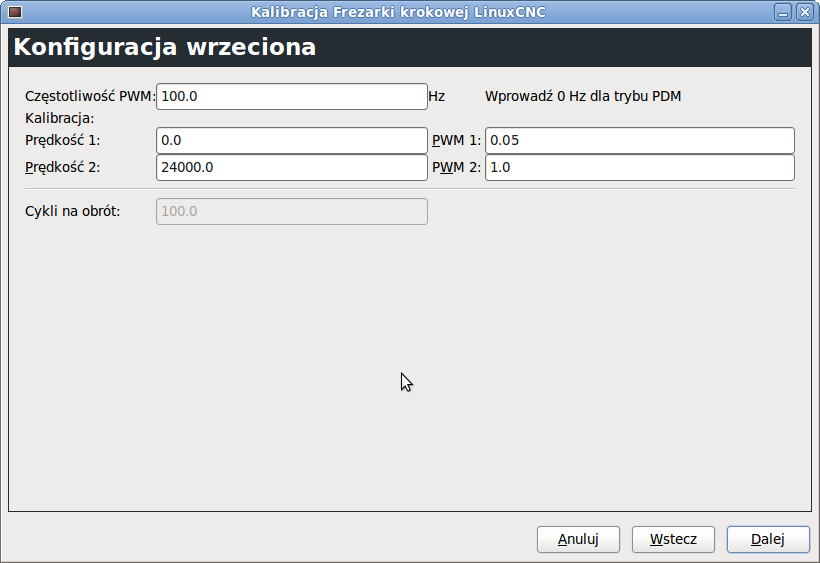
Poszczególne parametry:
- Częstotliwość PWM. Jest to częstotliwość z jaką pracuje program sterujący wypełnieniem sygnału. 100Hz jest wartością zalecaną. Wprawdzie zbyt mała częstotliwość sprawia że współczynnik wypełnienia jest generowany dokładniej, to jednak powoduje to większą trudność w zamianie współczynnika wypełnienia na stałe napięcie. W zależności od sposobu zamiany PWM na napięcie, przy niektórych metodach, a tak jest w tym przypadku, trudniej jest usunąć tętnienia w napięciu wyjściowym przetwornika. Z kolei zbyt duża częstotliwość powoduje, że dostrzegalna zaczyna być „kwantyzacja” sygnału PWM. Jest to spowodowane tym, że jądro systemu czasu rzeczywistego pracuje z określoną częstotliwością więc dobrze jest aby częstotliwość PWMa była przynajmniej 100 razy mniejsza niż częstotliwość jądra programu. W tym przypadku program pracuje na 50kHz co daje duży zapas dla zaprezentowanej konfiguracji
- Prędkość 1. Przyjęto 0. Silnik wyłączony. Dla takiej wartości obrotów PWM przyjmuje wartość określoną parametrem PWM1
- PWM 1 Współczynnik wypełnienia dla dolnej prędkości obrotowej. W tym przypadku przyjęto 0,05. W naszym przypadku zakładamy że skala z przetwornika waha się w przedziale 0..10V. Wyłączony PWM przyjmuje wartość 0% wypełnienia. Zakładamy, że w przypadku pracy wypełnienie osiągnie dla dolnej wartości 0,05 (5%) wartości maksymalnej co przekłada się na 0,5V na wyjściu przetwornika. To 0,5V to zabezpieczenie przed przypadkowym włączeniem się falownika
- Prędkość 2 Przyjęto 1,0 (100%). Silnik osiąga maksymalną prędkość obrotową
- PWM 2 Współczynnik wypełnienia dla górnej prędkości obrotowej. W tym przypadku 100% wypełnienie (1,0) na wyjściu PWM zamienione jest na 10V na wyjściu przetwornika. Nasze wrzeciono dla tej wartości będzie miało 24000 obr/min
Tak skonfigurowany PWM generuje nam na wyjściu pinu 14stego portu LPT następujące wartości:
- Wypełnienie 0 dla wrzeciona zatrzymanego
- Wypełnienie 5% dla prędkości minimalnej
- Wypełnienie 100% dla prędkości maksymalnej
- Wypełnienie między 5% a 100% dla prędkości pośrednich
Zakładając że wszystko jest podłączone i skonfigurowane jak należy zadawaniem prędkości obrotowej ręcznie wykonuje się w programie za pomocą kontrolek wyróżnionych na niebiesko w podanym rysunku:

Kolejnym etapem jest zaprojektowanie przetwornika zamieniającego PWM na napięcie w zakresie 0..10V. Na potrzeby testów wystarczy sygnał z pinu 14stego puścić na najzwyklejszy filtr dolnoprzepustowy RC z rezystorem 1k i kondensatorem 100uF. Ustawiając falownik na czułość w zakresie 0,5V dla 0 obrotów i 4,5V dla maksymalnych obrotów uzyskuje się dość użyteczny system sterowania obrotami wrzeciona. To rozwiązanie ma jednak wady:
- Niestabilne napięcie wyjściowe spowodowane zmiennym obciążeniem portu LPT oraz innymi zakłóceniami wnikającymi w obwód
- Brak izolacji galwanicznej
- Niepełny zakres napięcia wyjściowego, teoretycznie pomijalna kwestia. Nie mniej jednak przetwornik ADC na wejściu analogowym falownika najdokładniej odczytuje wartości dla pełnego zakresu 0..10V
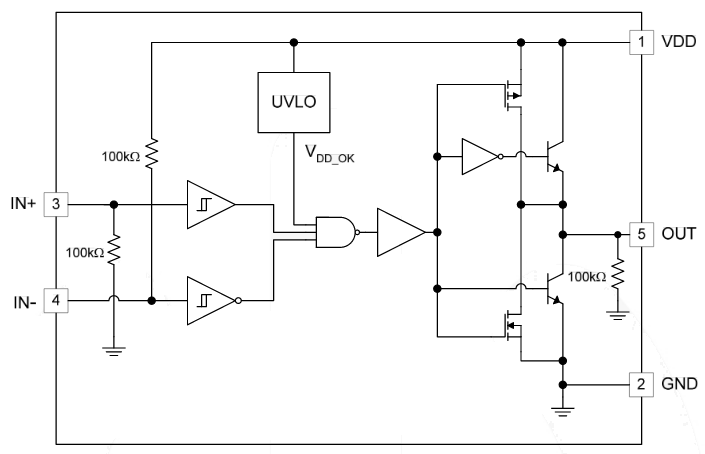
Wszystkie te problemy dość łatwo wyeliminować stosując zaprezentowany układ. Jako główny układ przełączający użyto połowy mostka H czyli układ FAN3100TSX. Rozszerzenie układu TSX nie jest przypadkowe. Ważne jest aby wejścia układu były TTL. Dzięki temu układ będzie sterowany logiką portu LPT pomimo że sam układ jest zasilany napięciem 10V. Budowa wewnętrzna układu FAN3100:
Bazując na tym układzie proponowany układ przetwornika wygląda następująco:
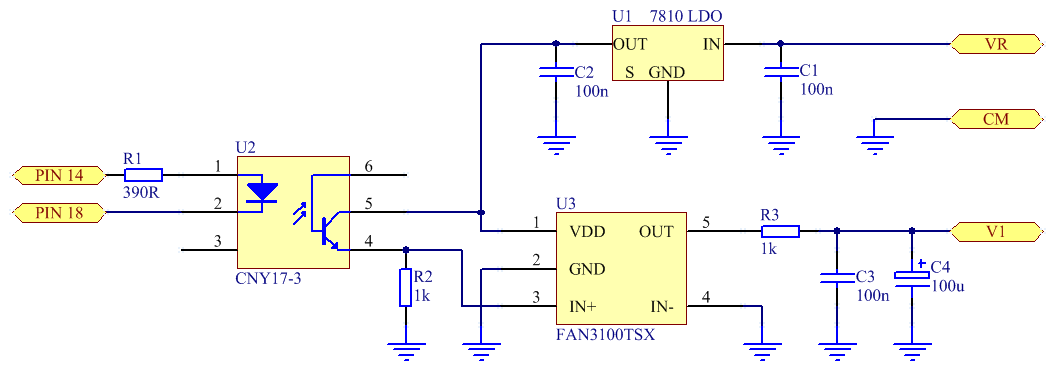
Zasilanie układu 12V brane jest z linii VR falownika. Napięcie to jest zmniejszane do 10V za pomocą stabilizatora. Ważne jest aby stabilizator nie miał większego spadku napięcia niż 2V. Spełnia to większość stabilizatorów jednak przed zastosowaniem konkretnego modelu należy zwrócić uwagę na ten parametr. Podczas doboru warto wyszukać stabilizatora który powszechnie nazywany jest jako LDO.
Nie zaleca się stosowania oddzielnego zasilania. 12V dostarczane przez falownik jest wystarczające a zewnętrzny zasilacz może generować dodatkowe problemy poprzez niepotrzebnie wprowadzane zakłócenia wprowadzane z samego zasilacza czy też przez pętle prądowe jakie zasilacz tworzy z falownikiem.
W przypadku gdyby użytkownik nie chciał stosować stabilizatora należy zmienić ustawienia w programie konfigurującym LinuxCNC. Należy przeliczyć tak maksymalny współczynnik wypełnienia aby dla maksymalnej prędkości generowane było napięcie 10V na wyjściu przetwornika.
W przedstawionym przetworniku transoptor zapewnia wskazaną w takim zastosowaniu optoizolację.
Ostatnim elementem jest podłączenie układu do portu LPT i falownika oraz odpowiednie skonfigurowanie jego parametrów. Dla wybranego falownika konieczne jest ustawienie parametrów:
- Freq – 3
- I6 – domyślne
- I7 – 0,5 (próg bezpieczeństwa)
- I8 – 0
- I9 – 9,8 (pewność że wrzeciono osiągnie maksymalne obroty)
- I10 – 400 (w naszym przypadku to 24000 obr/min)
W zależności od potrzeb, czy to prędkości początkowej ustawionej w tym przypadku na 0 co nie jest regułą, czy prędkości maksymalnej wszelkie parametry przedstawione można a nawet trzeba pozmieniać wg własnych potrzeb.